Le blog du Laboratoire Ouvert Ardèche-Drôme
Saison #2, épisode #9
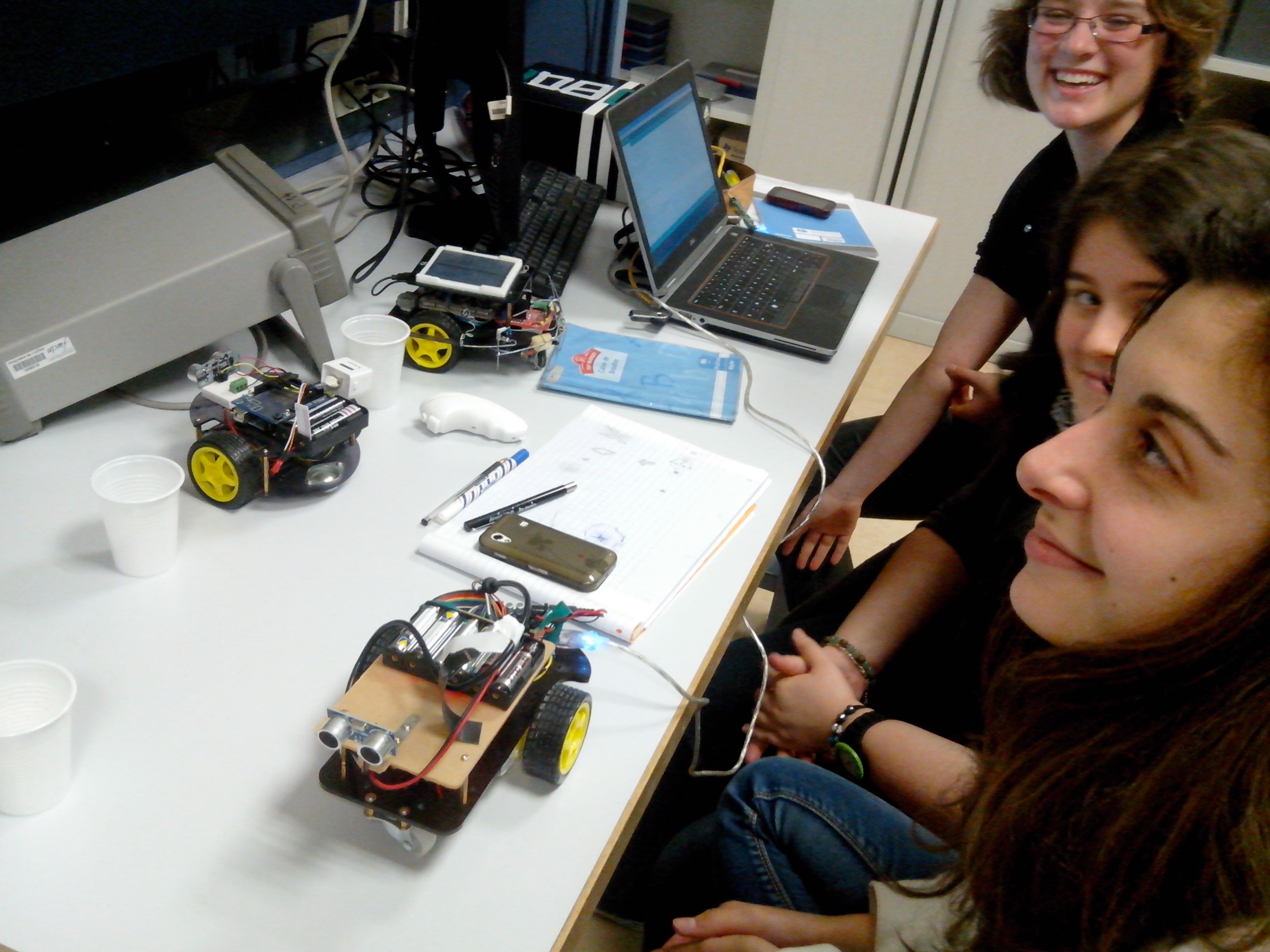
Visite de lycéennes travaillant sur un TPE autour de l’autonomie des robots
Mardi 7 janvier a eu lieu la 9e réunion de la 2e saison du L0ad, rassemblant environ 20 participants. Les Loaders se sont d’abord rassemblés autour de la traditionnelle galette pour se souhaiter une bonne année de faire soi-même, de découverte et de partage. C’était aussi l’occasion de fêter un anniversaire : il y a un an presque jour pour jour Mathieu A, Colin C., Nicolas C., Sébastien J., Alexis M. et Pascal S. faisaient germer l’idée, autour d’un verre dans un pub du centre ville, qui allait donner officiellement naissance quelques mois plus tard au L0AD.
Ensuite, chacun s’est replongé (seul ou en groupe) dans ses activités, toujours dans la bonne humeur !
Un petit résumé non exhaustif des activités de la soirée :
- Sébastien C. a passé un très long moment à essayer de corriger un problème d’affichage sur l’atmosphère des planètes de son jeu (glitchyverse). Après une grosse prise de tête et une remontée jusqu’au cœur du moteur, le bug a été plus ou moins identifié (à priori l’échelle de valeurs du système de coordonnées de la caméra n’est pas le même que celui utilisé par les différents objets). Le problème a été corrigé, mais la solution n’est pas satisfaisante. En dehors de ça, un premier draft d’un algorithme de génération de végétation (en 2D) a été rédigé, il sera transposé en 3D à terme pour l’intégrer (on peut voir une démo là, faire F5 pour générer d’autres arbres)
- François R. a fait un peu de hack sur QEmacs et a débuté le support de org-mode qu’il a contribué (voir capture d’écran). Il a également contribué à l’animation musicale de la séance en passant une vidéo d’un concert son et lumière de
lecteurs de disquettes
- Thibault T. a fait des mesures de consommation électrique avec le prototype réalisé dans le cadre de son projet OpenConso. Il a comparé la mesure de consommation de quelques appareils avec celle effectuée grâce à un wattmètre-prise silvercrest et a pu constater un écart de seulement 1 à 2 % qui lui a donc permis de valider son prototype.
- Sébastien J. et Thibault T. ont également accueilli des lycéennes planchant sur un TPE autour des robots autonomes et leur ont présenté leurs robots respectifs (robot-pic, Will-E). Ils ont ensuite répondu aux questions des lycéennes, et leur ont expliqué plus en détail la logique de détection d’obstacle et la gestion des moteurs.
-
Mathieu A. a presque fait quelque chose en vrai ;-). Avec Adrien J., il a trifouillé un radio réveil inutilisé pour essayer de comprendre un peu comment fonctionnait le récepteur radio (ça reste encore assez flou), et voir si il y a moyen de piloter soi-même l’afficheur 7 segments. Par chance, le chip qui commande l’afficheur est très bien documenté, et il devrait donc être possible, avec moultes coups de baguette magique, de pouvoir afficher individuellement (presque) tous les segments.
Il a ensuite eu droit à un cours magistral par environ 5 à 6 personnes motivées en simultané pour essayer de lui faire croire que la loi d’Ohm est simple. Il n’a été qu’à moitié convaincu, le souci étant toujours de savoir comment l’appliquer (isoler des parties du circuit, savoir pour chaque composant quelle sont les caractéristiques pour pouvoir « fixer » une des variables U, R ou I). C’était très instructif.
- Nicolas C. a essayé, notamment avec l’aide d’Olivier T. et de Waldeck G., de récupérer le contenu d’une clé usb muette. Le diagnostic du problème n’étant pas établi, tout reste à faire et en particulier de nouvelles recherches sur internet !
- Sébastien J. a fait une démonstration de l’utilisation d’un cube à LED rouge comme moniteur d’un jeu de la vie en 3D. Un Arduino pilote le cube, en s’appuyant sur l’utilisation de registres à décalages. Une librairie (GitHub) a été écrite pour simplifier l’écriture d’application utilisant le cube, avec par exemple la définition d’une fonction permettant d’afficher une image sur le cube et la laisser persister pendant 20ms. Une application Arduino (GitHub) permet de recevoir (avec un petit handshake) des images reçues à travers une liaison série et les afficher en utilisant la librairie précédente. Enfin, une application Processing (GitHub) implémente un jeu de la vie et utilise le cube pour afficher le monde et son évolution (Une vidéo et de la documentation bientôt !)
- Rémy E. a testé un kit Arduino Grove acheté chez SeeedStudio.
Quelques photos ci-dessous :
-
- QEmacs avec un début de support Org-mode
-
- Un cube à Led 4x4x4 rouge utilisé comme moniteur d’un jeu de la vie en 3D
-

- Rémy E. teste son kit Arduino Grove
-

- Quelques capteurs du kit Grove (température, Em/Rec radio)
-

- La shield Arduino du kit Grove
-
- Zoom sur le projet OpenConso de Thibault T.
-

- Thibault T. étalonne sa sonde de mesure de puissance OpenConso
-

- Visite de lycéennes travaillant sur un TPE autour de l’autonomie des robots
-

- Pascal S. fait avancer tranquillement son projet de pilotage de chaudière via un RPi
-

- Nicolas C. et Waldeck G. tentent d’identifier le chipset d’une clé USB muette
-

- Pascal S. dompte son RPi pour qu’il dompte à son tour une chaudière
-

- Nathanaël S., roi d’un soir au L0AD
-

- Thomas G. reprend un vieux projet de matrice de leds piloté par Arduino
-

- Un vieux radio réveil : plein de choses à découvrir et à apprendre !
-
- Mathieu A. et Adrien J. en plein reverse engineering d’un vieux radio réveil
-

- Mathieu A. découvre avec une joie non dissimulée la loi d’Ohm, grâce à Adrien J. et Olivier T.
Comments are closed.